


Stage 1. The first chassi kit construction. Click to learn more
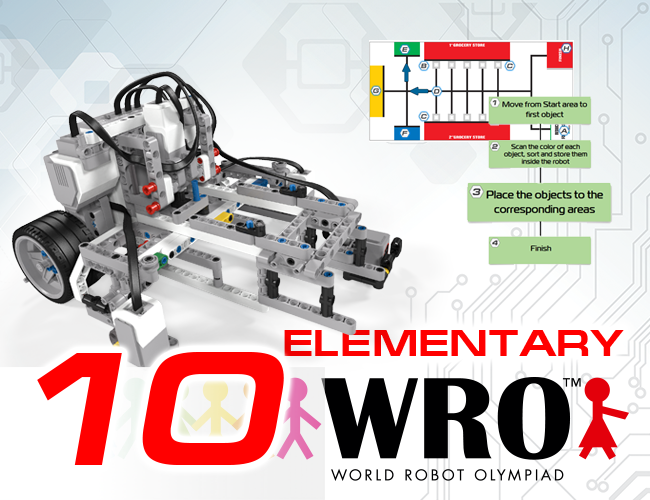
Introduction to the preparation plan. The rules for the Elementary Category in the WRO 2017 competition. Developing a strategy for the completion […]
A post type for your projects
Introduction to the preparation plan. The rules for the Elementary Category in the WRO 2017 competition. Developing a strategy for the completion […]

Putting dead weight instead of a manipulator. Measuring the key robot parameters. Programming movement for a fixed distance. The timer program – […]

The types of precise turns. The geometry of a chassi kit. The turn of the first type. The turn of the second […]

Analysing the field of the competition and choosing the easiest missions. The route to take for the first tasks. Building a beam-manipulator […]
Determining the route sections where a colour sensor is needed. Choosing the optimal position and the height for colour and light sensor […]
Passing the grid points using one colour sensor. The relay and P-controller. Following curves of various curvatures using one colour sensor. The […]
Optimizing the position and height for the second colour and light sensor installation. Aligning on the borders of coloured areas and lines […]

Choosing an optimal construction type. The analysis of possible variants. Constructing a manipulator for laying the cubes out. Writing a program for […]

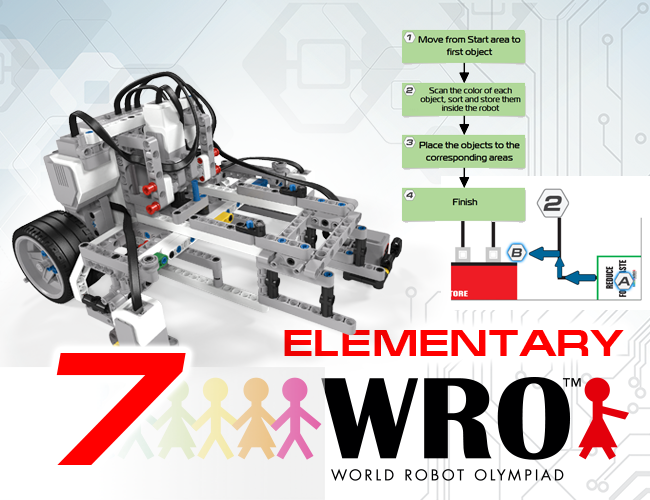
The ways of object detection in the areas. Using two sensors for a simultaneous scanning of two positions. Detecting objects using a […]
The algorithms for processing data from two or more sensors. Logical data type operators. Writing and testing the program for the object […]
